Below is an open problem, an approachable problem, one perhaps you will be the one to solve!
We send a bit over a noisy grid, starting from the origin and propagating out as a wave. Can we can recover the original bit when looking at just the wavefront?
This is easy to solve for 1D, mostly solved in 2D, and still open in 3D and above.
Here is the lecture that introduced the problem to me, as well as the paper proving the impossibility of a set of functions in 2D.
The problem
1D
We start with a bit at the root node, in this case the bit is a 1, then that node sends the bit to the next node, indicated with an arrow. This repeats forever. There is a small probability, which we call the temperature, that the bit will flip during each transmission.
The question is, can you determine the original bit by only looking at the last bit in a long chain?
You cannot. Your chances of guessing correctly decay exponentially with every hop, down to 50%, at which point you are guessing at random. There’s a good chance the bit is flipped multiple times between the origin and the node you are looking at, so there’s a roughly equal chance it’s a 1 or 0 regardless of what it started out as.
There was no way to preserve the original information in 1D. Perhaps we can in 2D?
2D
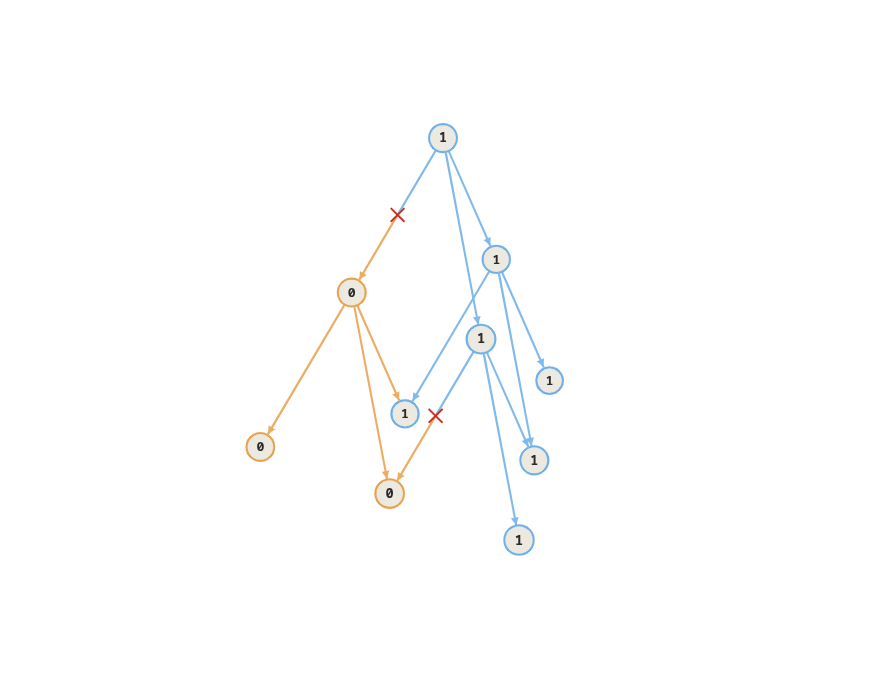
Now the information of the original bit gets replicated at each layer, so perhaps there is a better chance we can recover the bit?
In order to attempt to recover the bit, we are allowed to look at all the nodes in the wavefront. We will guess that the original bit was a 1 if the majority of bits in the wavefront are 1s, and then likewise for 0s. For the full open problem you are free to use any calculation on the final bits, but we will isolate ourselves to just the majority calculation today. We say the bit is recoverable if the expected percent of correct bits in the wavefront is strictly > 50% as we look at the layers in their limit (again, just for this restricted version of the problem, in general you should be looking to prove that there exists a decoder error bounded away from 0.5 in the limit).
We also need to decide how each node in our 2D grid should handle receiving two different inputs. If both inputs match, then we pass that value forward, as that is likely the value of the original bit. If they are different, we will just pass forward a random value, as both are equally likely.
In this single example, we see how between the 6th and 7th layer the information about the original bit was lost, as it was no longer the majority of the wavefront.
Note that the full problem looks at assigning functions to each node, where each node can decide for itself how to handle two inputs. Perhaps some clever combination of functions arranged on the grid will allow more information to be preserved, such as is the case with Toom’s rule (although Toom’s rule is for 3D, it is the spirit of this type of rule we are looking for). But for a homogenous assignment of any function, it has been proved information is not preserved, at least for 2D. For today, we will use just one function: pass forward the majority bit, or pick at random in a tie.
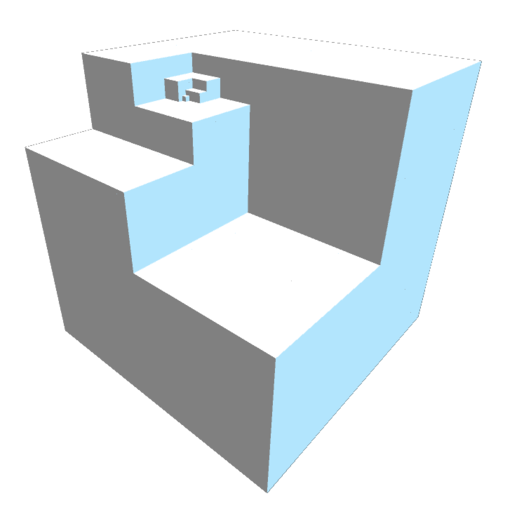
3D
The open question, can we recover the bit from the 3D wavefront?
The majority function makes natural sense here, as most nodes have 3 inputs and can erase a bad bit. This means if a single bit gets flipped, there is a good chance it gets immediately fixed due to the surrounding bits being correct and the majority function overwriting the error. Is this enough to maintain the original bit at the wavefront? Let’s explore!
Exploring
Simulations
The first and easiest thing to do is to just simulate a bunch of random 3D grids and see if the percent of bits along the wavefront tend to go to 50% or not, sampled across different temperature values.
Because this is probabilistic, let’s run 100 simulations each, with grids out to 300 layers and checked at 10 different temperature values. It is likely that the temperature only starts to matter at small values, so let’s sample those logarithmically.
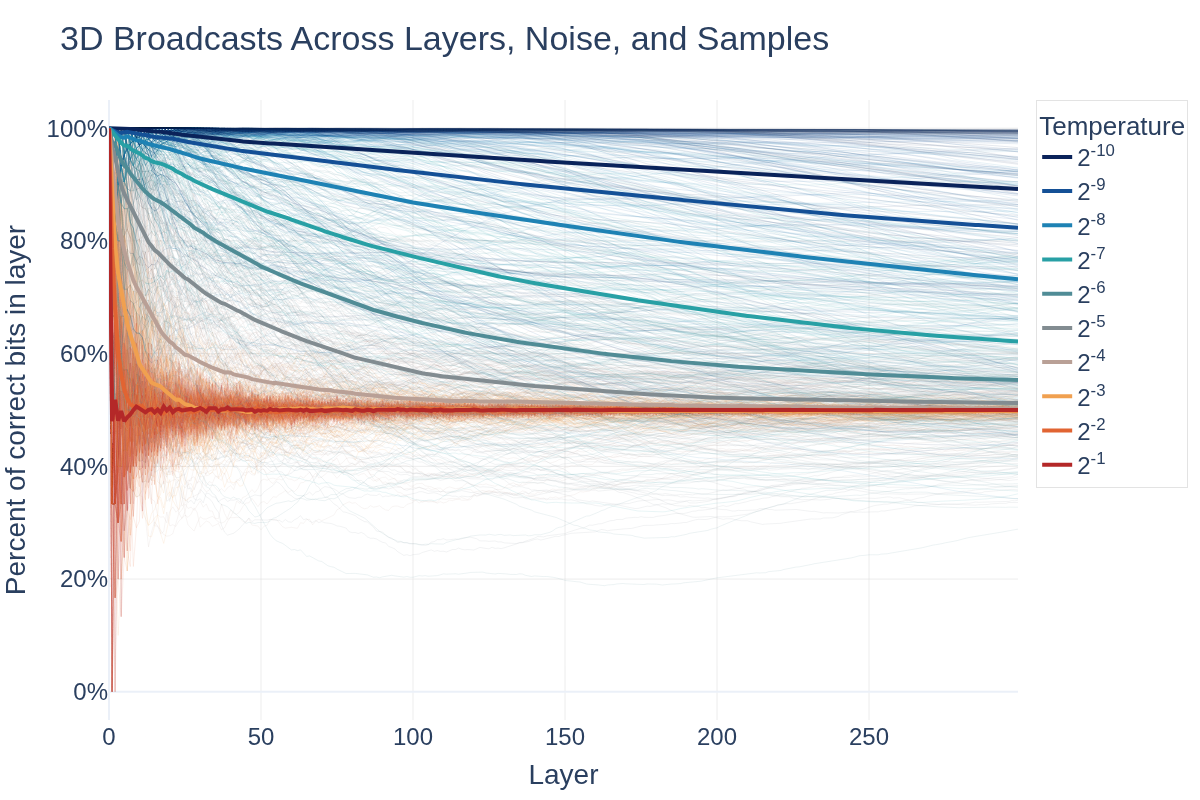
At high temperature, the percent of correct bits drops to 50% very quickly, meaning the original bit is quickly irrecoverable. As we decrease the temperature, the percent of correct bits stays high for longer, but still eventually reaches 50%. At very low temperatures, starting around $2^{-6}$, it is hard to tell when or if the original bits will stay as the majority. Perhaps if we simulate more layers we will see the percent eventually drop, or perhaps at such low temperatures the correct bit will always stay the majority. We don’t know. If there is a phase change from information-eroding to information-preserving anywhere, which we do not know, these empirical simulations suggest we start looking at roughly around $2^{-5}$.
To get a more intuitive idea for the problem, here is an interactive visualization with many options which we will explore next.
This is the main visual we will play with, so spend some time with it.
Less noise
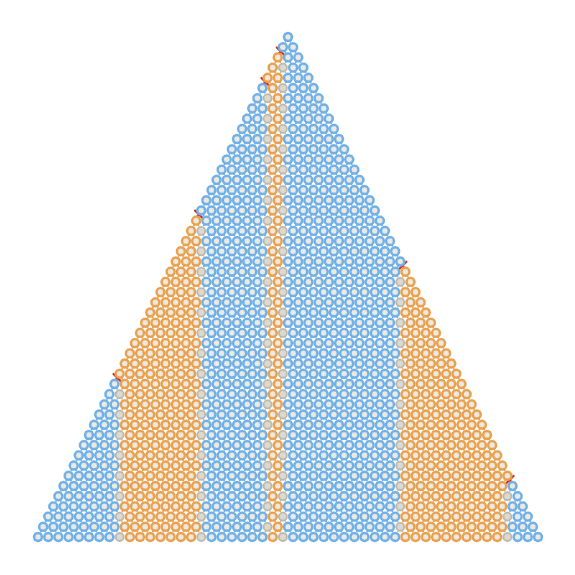
Notice that at low temperatures a lot of the incorrect bits come from near the axes (sides) of the grid. Turn on axes only for the 2D grid to see what happens if we only allow noise on the axes, see if we can spot any patterns.
There are a lot of incorrect bits considering that only the edges on the axes have noise. It looks as is the flipped bits on the axes are making their way down into the triangle.
Notice that the axes are actually 1D chains, which we know are problematic. In particular, we know the 1D chains are about 50% 1s and 50% 0s, with the expected size of each segment inversely proportional to the temperature. When we look at the full picture, it seems the noise from these 1D edges seem to be reaching into the entire 2D grid, cascading down to the wavefront.
One complication is that the information looks to move back and forth as it cascades down. Because we have nodes pick random outputs for tied inputs, the boundary between a region of 1s and 0s moves as a random walk (more specifically a Gamblers Ruin since it terminates when it has 0 width). It makes the analysis harder when the known errors at the top of the triangle do a random walk before reaching the wavefront. How do random walks effect the errors as they fall down to the wavefront? I don’t know, so I will make a simplification instead.
I will add a simplification that removes the random walks. I find this simplification highly suspect, potentially over-simplifying to the point of making our model vacuous. But, as always, it is helpful to consider simpler models to discover insights that may have been hidden under complexity.
Undefined nodes
We can ignore nodes that have a tie on their inputs, which will then stop useless information from cascading down the grid. This actually feels more principled then picking an output at random.
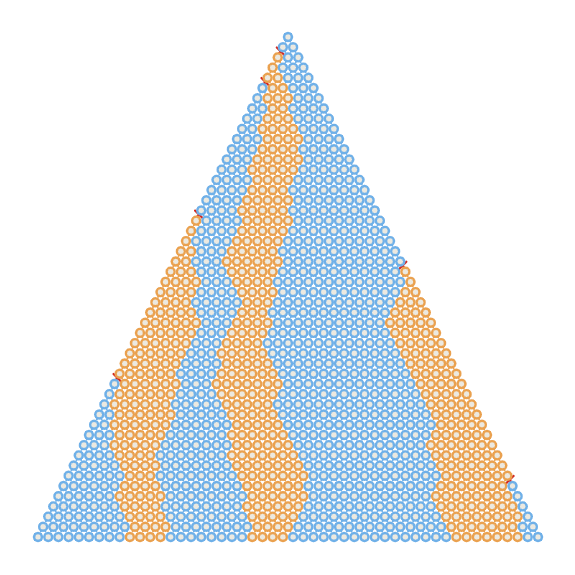
This also turns our random walks into straight lines. Turn on the stay undefined for ties.
This is much easier to analyze. The 1D chains have alternating segments of 1s and 0s, with expected equal lengths, being projected down onto the wavefront. Importantly, the expected size of the segments for 1s is equal to the expected size of segments for 0s, which means we expect the bottom of the triangle, the wavefront, to have an equal number of 1s and 0s.
This means there is no way we expect to be able to recover the information from the wavefront.
How does this interact in 3D? Try on the visualization.
You should find that by only allowing noise on the axes and turning on undefined nodes, we get a very structured pattern of V-shaped strips on the wavefront (the bottom of the pyramid). This is the projection of the 2D walls of the pyramid down to its floor (the wavefront). Because we know the 2D walls are 50% 1s and 0s, their projection onto the 3D wavefront will also produce 50% 1s and 0s.
Conclusion
For our restricted case, using the majority function everywhere, the above analysis suggests that the problem of recovering a bit propagated over a noisy 3D grid is impossible. In fact, the analysis here suggests that we only need noise along the axes to make the information irrecoverable. But I am not yet convinced.
My biggest concern is the introduction of the undefined nodes which remove the random walks, where I suspect the random walks may enable the erosion property. Undefined nodes essentially disable the eroding power of the majority function by creating a wall between the disagreements, which is the property we were hoping to leverage. We also failed to consider alternative function assignments or decoders.
What remains to be seen is if any of the informal descriptions made here can be mapped to rigorous proofs, or if not, identifying the critical misstep and hopefully shining some light on the assumptions necessary for the eventual proof.
All the code can be found at this repo if you want to play with the visuals or simulation.
Other models to explore
There are so many more models to explore, below are just a few ideas.
- Triangle and hexagonal grids.
- Grids with larger neighborhoods.
- Grids with growing (exponential) neighborhoods.
- Inverse grids (start at a boundary and flow inward to the origin).
- Multiple root nodes.
- Grids with finite size that wrap around on themselves.